[vc_row content_aligment=”center” video=”show_video” video_mp4=”https://spacebok.ethz.ch/wp-content/uploads/2020/02/0001-0413.mp4″ video_image=”1974″][vc_column offset=”vc_hidden-sm vc_hidden-xs”][vc_empty_space height=”650″][vc_row_inner content_width=”grid” content_aligment=”center”][vc_column_inner width=”1/4″][vc_single_image image=”1988″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” css_animation=”bounceIn” link=”https://ethz.ch/de.html”][/vc_column_inner][vc_column_inner width=”1/4″][vc_single_image image=”1989″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” css_animation=”bounceIn” link=”https://rsl.ethz.ch/”][/vc_column_inner][vc_column_inner width=”1/4″][vc_single_image image=”1992″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” css_animation=”bounceIn” link=”https://www.zhaw.ch/en”][/vc_column_inner][vc_column_inner width=”1/4″][vc_single_image image=”1991″ img_size=”full” alignment=”center” onclick=”custom_link” img_link_target=”_blank” css_animation=”bounceIn” link=”https://www.esa.int/”][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row content_width=”grid” anchor=”Home” content_aligment=”center” css=”.vc_custom_1580846273088{padding-top: 70px !important;padding-bottom: 71px !important;background-color: #ffffff !important;}” el_id=”Home”][vc_column]
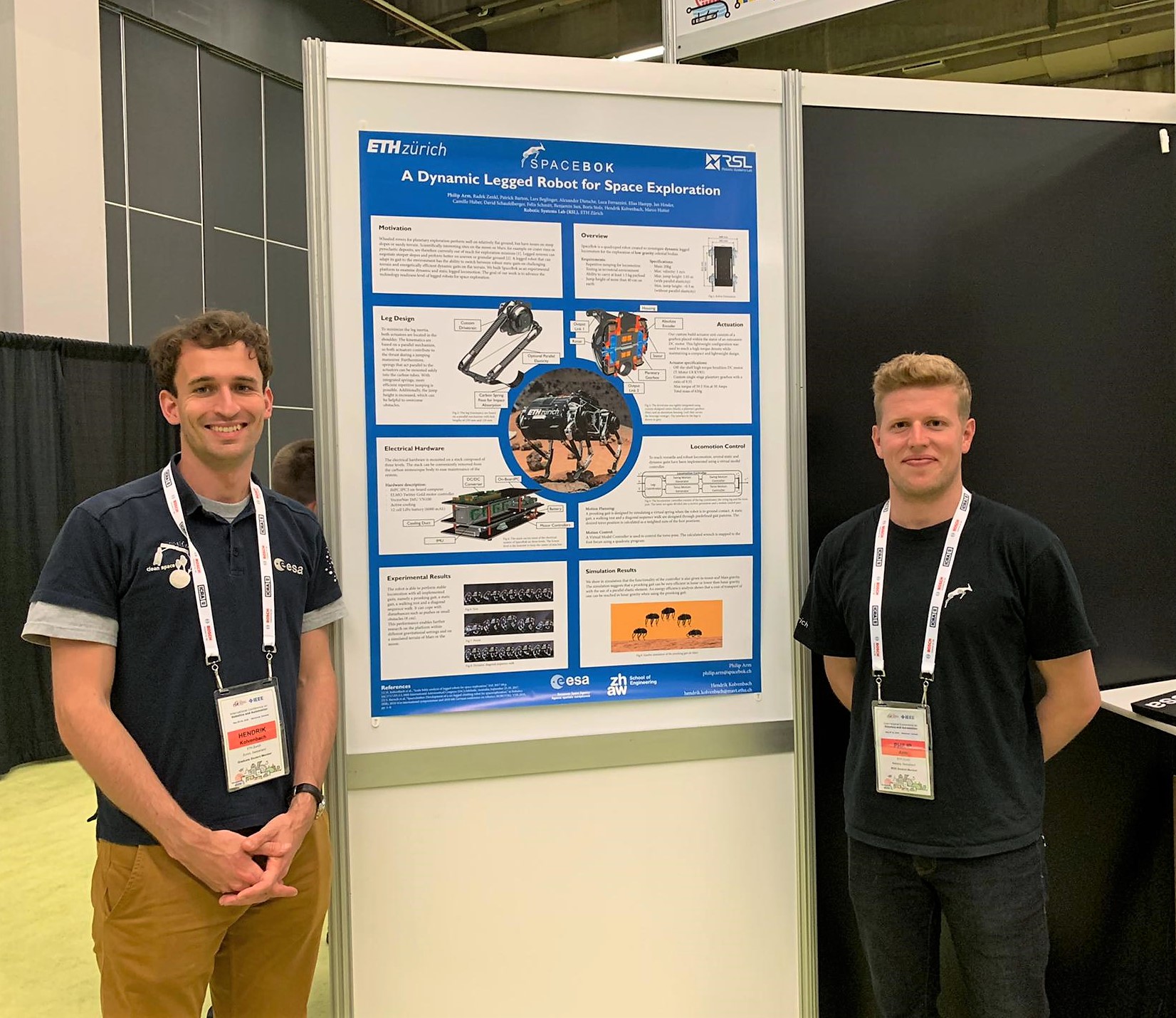
SpaceBok, a Locomotion Concept for Space Exploration
Legged robots are advancing fast here on Earth, let’s get them to space!
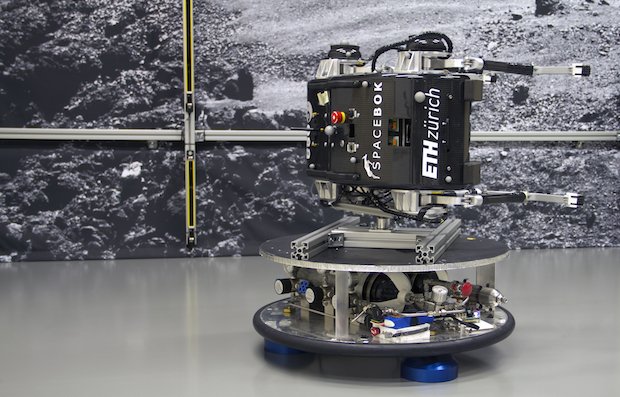
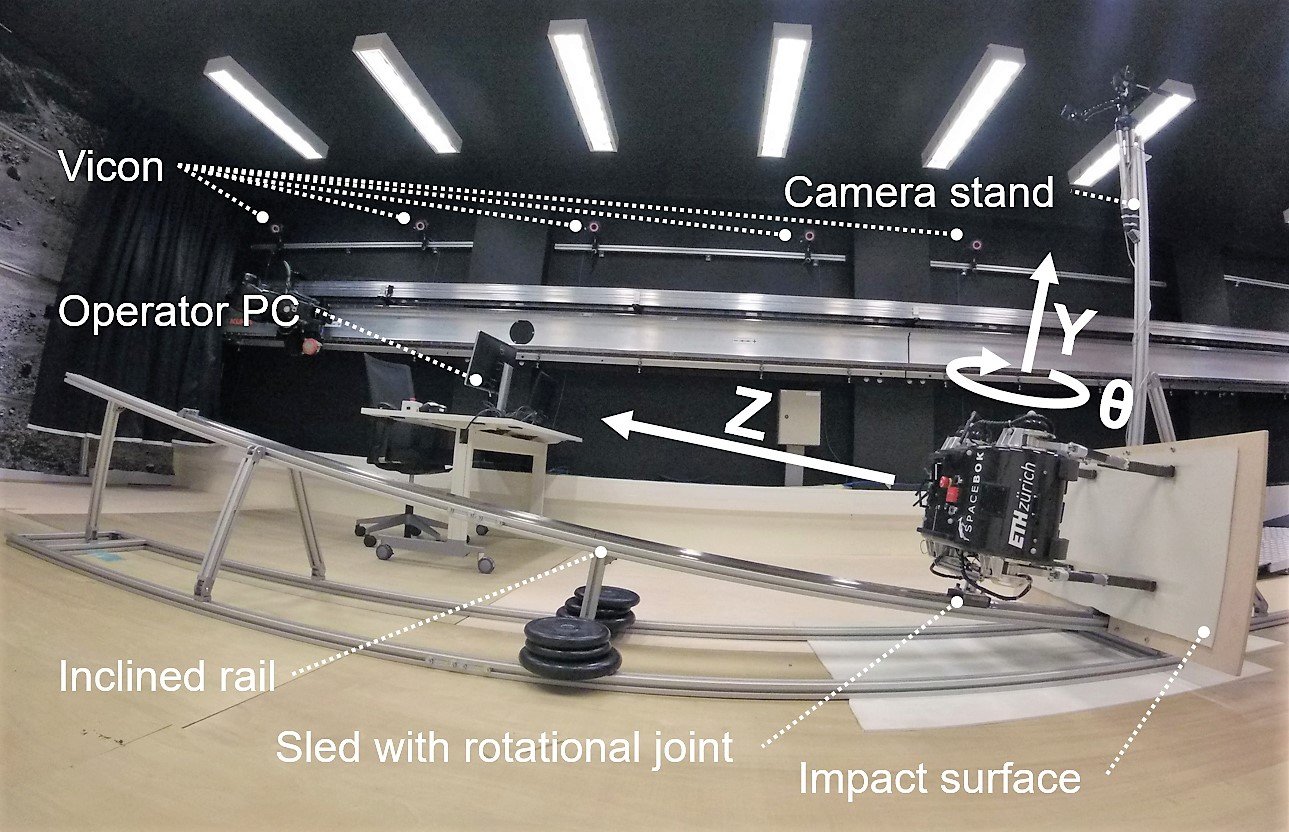
Walking robots show high versatility. With precise foot placements, sandy slopes or rocky terrain can be tackled. For long-range missions , more energetically efficient gaits can be employed . Such a system could take us to places where no other robot has ever been. Sites of great scientific importance such as deep extra-terrestrial craters and canyons would for the first time be within human reach. SpaceBok has been specifically built to test the feasibility of dynamic locomotion in low gravity. We hope that our findings contribute to the future of space exploration.[/vc_column_text][vc_empty_space height=”20px”]
News
[/vc_column_text][vc_empty_space height=”40px”]
-
-
SpaceBok was featured in the TCT magazine
in NewsThe TCT Magazin covered the story of SpaceBok and ...
-

SpaceBok at the “New Space Economy” Forum in Rome
in NewsWe exhibited the robot at the booth of Swissnex at...
-
“Towards Jumping Locomotion for Quadruped Robots on the Moon” is presented at IROS 2019 in Macau
in NewsThe outcome of our jumping experiments at ESTEC ha...
-
-
-

-

69th International Astronautical Congress
in NewsWe had the opportunity to present SpaceBok at the ...
Technical Specifications
[/vc_column_text][vc_empty_space height=”40px”][vc_row_inner content_aligment=”center”][vc_column_inner width=”1/5″][vc_single_image image=”1879″ img_size=”100×100″ alignment=”center” style=”vc_box_circle” css_animation=”bounceIn”][vc_empty_space height=”20px”][vc_column_text]
20 KG Weight
[/vc_column_text][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/5″][vc_single_image image=”1880″ img_size=”100×100″ alignment=”center” style=”vc_box_circle” css_animation=”bounceIn”][vc_empty_space height=”20px”][vc_column_text]
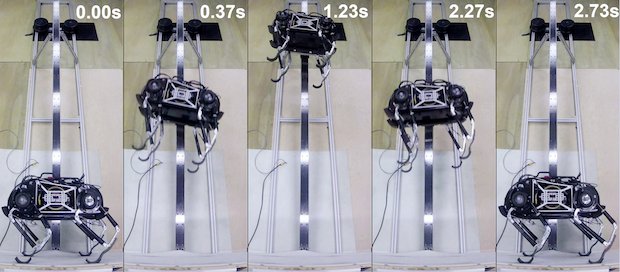
1 m Max. Jump Height
[/vc_column_text][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/5″][vc_single_image image=”1881″ img_size=”100×100″ alignment=”center” style=”vc_box_circle” css_animation=”bounceIn”][vc_empty_space height=”20px”][vc_column_text]
Electric Actuation
[/vc_column_text][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/5″][vc_single_image image=”1882″ img_size=”100×100″ alignment=”center” style=”vc_box_circle” css_animation=”bounceIn”][vc_empty_space height=”20px”][vc_column_text]
Battery Powered
[/vc_column_text][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/5″][vc_single_image image=”1883″ img_size=”100×100″ alignment=”center” style=”vc_box_circle” css_animation=”bounceIn”][vc_empty_space height=”20px”][vc_column_text]
Parallel Elasticity
[/vc_column_text][vc_empty_space height=”20px”][/vc_column_inner][/vc_row_inner][vc_empty_space height=”40px”]
Drivetrain
Leg Design
[/vc_column_text]
Monocoque Body
Electronic Stack
Locomotion
This performance enables further research on the platform within different gravitational settings and on a simulated terrain of Mars or the moon.[/vc_column_text]
Control
A pronking gait is designed by simulating a virtual spring when the robot is in ground contact. A static gait, a walking trot and a diagonal sequence walk are designed through predefined gait patterns. The desired torso position is calculated as a weighted sum of the foot positions.
A Virtual Model Controller is used to control the torso pose. The calculated wrench is mapped to the foot forces using a quadratic program.[/vc_column_text]
Flight Phase
Motivation
[/vc_column_text][vc_empty_space height=”20px”][vc_column_text]
For the past few decades, wheeled robots such as lunar rovers have been extensively used for the exploration of celestial bodies. While such systems perform well in terms of stability and efficiency, they come to their limits on steep slopes or sandy terrain. A stuck or flipped rover can hardly recover from its position and would often mean the end of the mission. Difficult terrain will often be avoided in mission planning. Scientifically interesting sites on the moon or Mars, for example on crater rims or pyroclastic deposits, are therefore currently out of reach for exploration missions.
[/vc_column_text][vc_empty_space height=”20px”][vc_column_text]
Legged systems can negotiate steeper slopes and perform better on uneven or granular ground. A legged robot that can adapt its gait to the environment has the ability to switch between robust static gaits on challenging terrain and energetically efficient dynamic gaits on flat terrain. We built SpaceBok as an experimental platform to examine dynamic and static legged locomotion. The goal of our work is to advance the technology readiness level of legged robots for space exploration.
[/vc_column_text][vc_empty_space height=”40px”][/vc_column_inner][vc_column_inner width=”1/3″][vc_empty_space height=”40px”][vc_single_image image=”1977″ img_size=”medium” alignment=”center” css_animation=”bounceIn”][vc_empty_space height=”20px”] Read more [/vc_column_inner][/vc_row_inner][vc_empty_space height=”100px”][/vc_column][/vc_row][vc_row content_width=”grid” anchor=”Project” el_class=”custom-row-class” el_id=”Project”][vc_column][vc_empty_space height=”40px”][vc_column_text]
Project
[/vc_column_text][vc_empty_space height=”30px”]
SpaceBok is a project of the Robotic Systems Lab at the ETH Zürich.[/vc_column_text][vc_empty_space height=”20px”]

Supervisor
Hendrik Kolvenbach

Head of Robotics Systems Lab
Marco Hutter

Student Coach
Boris Stolz

Software
Philip Arm

Software
Patrick Barton
Mechanical Hardware
Lars Beglinger

Software
Alexander Dietsche

Electronic Hardware
Luca Ferrazzini

Software
Elias Hampp

Mechanical Hardware
Jan Hinder

Electronic Hardware
Camille Huber

Electronic Hardware
David Schaufelberger

Mechanical Hardware
Felix Schmitt

Mechanical Hardware
Benjamin Sun

Mechanical Hardware
Radek Zenkl
Contact us for questions or collaborations!
[/vc_column_text][vc_empty_space height=”16px”][vc_row_inner][vc_column_inner][vc_column_text]SpaceBok
Robotic Systems Lab – ETH Zürich
Leonhardstrasse 21 H
8092 Zürich
Switzerland
[/vc_column_text][vc_empty_space height=”40px”]
Sponsors
[/vc_column_text][vc_empty_space height=”40px”][vc_column_text]
Gold Sponsors
[/vc_column_text][vc_empty_space height=”20px”][vc_row_inner css=”.vc_custom_1580782335232{padding-top: 20px !important;background-color: #ededed !important;}”][vc_column_inner width=”1/6″][vc_single_image image=”1780″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.novagear.ch/en/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][vc_single_image image=”1778″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”http://www.kmf-bearings.de/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][vc_single_image image=”1862″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.spacecenter.ch/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][vc_single_image image=”1766″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”http://aurora-aero.ch/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][vc_single_image image=”1772″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.feusi.ag/EN/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][/vc_column_inner][/vc_row_inner][vc_empty_space height=”20px”][vc_column_text]
Silver Sponsors
[/vc_column_text][vc_empty_space height=”20px”][vc_row_inner css=”.vc_custom_1580782923777{padding-top: 20px !important;background-color: #ededed !important;}”][vc_column_inner width=”1/6″][vc_single_image image=”1776″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.helbling.ch/?lang=en”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][vc_single_image image=”1784″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”http://uav-en.tmotor.com/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][vc_single_image image=”1770″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.elmomc.com/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][vc_single_image image=”1767″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.cncdynamix.ch/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][/vc_column_inner][vc_column_inner width=”1/6″][/vc_column_inner][/vc_row_inner][vc_empty_space height=”40px”][vc_column_text]
Bronze Sponsors
[/vc_column_text][vc_empty_space height=”20px”][vc_row_inner css=”.vc_custom_1580782868920{padding-top: 20px !important;background-color: #ededed !important;}”][vc_column_inner width=”1/6″][vc_single_image image=”1785″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.vectornav.com/”][vc_empty_space height=”20px”][vc_single_image image=”1775″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.hasler.ch/”][vc_empty_space height=”20px”][vc_single_image image=”1765″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://almatech.ch/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][vc_single_image image=”1783″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.swiss-composite.ch/”][vc_empty_space height=”20px”][vc_single_image image=”1774″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.hubersuhner.com/en”][vc_empty_space height=”20px”][vc_single_image image=”1764″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.3d-model.com/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][vc_single_image image=”1782″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.schaeffler.ch/content.schaeffler.ch/de/index.jsp”][vc_empty_space height=”20px”][vc_single_image image=”1773″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”http://www.gysin.com/en/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][vc_single_image image=”1781″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.rls.si/”][vc_empty_space height=”20px”][vc_single_image image=”1771″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.feintool.com/en/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][vc_single_image image=”1779″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.libs.ch/”][vc_empty_space height=”20px”][vc_single_image image=”1769″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.durovis.ch/”][vc_empty_space height=”20px”][/vc_column_inner][vc_column_inner width=”1/6″][vc_single_image image=”1777″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.klebwerkstatt.ch/”][vc_empty_space height=”20px”][vc_single_image image=”1768″ img_size=”large” onclick=”custom_link” img_link_target=”_blank” link=”https://www.distrelec.ch/”][vc_empty_space height=”20px”][/vc_column_inner][/vc_row_inner][vc_empty_space height=”40px”][/vc_column][/vc_row]